

【 릴리패드LilyPAD#2】 릴리패드 처음 사용설명서~! (영상설명)
지난시간 릴리패드에 대한 소개를 하였는데요,
이번 시간에는 릴리패드를 사용하여 패드에 달려있는 LED를 동작시켜 보는, 기본 코딩까지 진행해 보도록 하겠습니다.
아울러 릴리패드328 기본 모델의 경우 작은 시스템이나 웨어러블 기기에 적합하도록 작고 가볍게 만들기 위해 FTDI칩이 제외 되어 있어서 PC를 통해 코딩하기 위해서는 'FT232RL'과 같은 모듈을 사용해야 하는데요, 이와 관련한 설정까지 다루어 보겠습니다.

▶ 선수학습 :
1. 릴리패드종류와 특징 소개 ☜ 클릭!
▶ 영상학습 :
▶ 제작과정 :
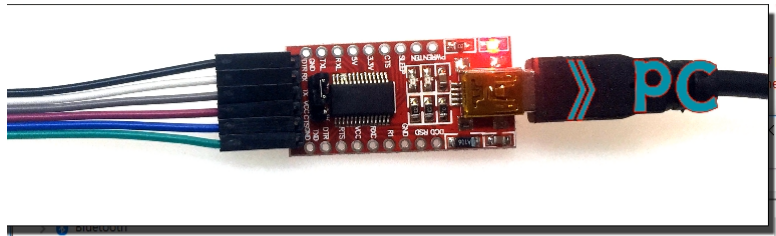
1. PC와 통신을 위해 UART통신용 'FT232RL' 과 같은 모듈을 준비한다.

USB-Mini 케이블을 이용하여 위와 같이 연결하게 된다.
2. FTDI 모듈을 사용하기 위해서는 모듈제조사 홈페이지에서 제공하는 FTDI 드라이버를 설치해야
PC에서 장치로 인식하여 통신이 가능해진다.
모듈제조사 사이트 링크 : https://www.ftdichip.com/Drivers/VCP.htm
Virtual COM Port Drivers
Virtual COM port (VCP) drivers cause the USB device to appear as an additional COM port available to the PC. Application software can access the USB device in the same way as it would access a standard COM port. This software is provided by Future Technol
www.ftdichip.com
링크를 클릭해서 접속하면 아래 사이트로 접속이 되고,

아래 표시를 참고하여 자신의 PC 운영체제에 맞는 버전을 다운로드 한다.

다운로드 한 파일은 압축만 풀어 놓는다. 만약 윈도우 OS를 사용하며, 64bit OS 라면, 아래 첨부파일을 바로 다운받으면 된다.
3. 제어판의 시스템으로 들어가서 장치관리자를 열어 보면, 기타장치에 'FT232R' 모듈이 검색되어 있는 것을 볼 수 있고, 드라이버 미실치로 인해 사용할 수 없는 상태이다.

4. 해당장치 위에 마우스 우클릭 후 "드라이버 업데이트"를 클릭!
두 번째 메뉴 '컴퓨터에서 드라이버 소프트웨어 검색(R)'을 클릭! 하여 설치를 진행한다.

5. 찾아 보기를 눌러 좀 전에 다운 받아 압출을 풀어 놓은 FTDI드라이버 폴더를 선택.

6. 추가로 발견된 장치가 있으면 같은 방법으로 드라이버폴더를 지정하여 설치를 완료한다.

7. FT232RL 모듈에 릴리패드를 아래 이미지와 영상을 참고하여 연결 한다.

8. 그리고 다시 mini-USB케이블을 이용하여 PC와 연결한다.
만약 아래처럼 릴리패드328 모듈에 있는 LED에 불이 들어오지 않는 다면, 케이블 연결이 잘못되거나 방향이 반대 일 가능성이 있으니 제대로 연결하여야 한다. ( 릴리패드는 칩있는 곳을 위로하고, FTDI 모듈은 칩있는 곳을 바닥으로 놓은 상태에서 선을 크로스 하지말고 일자로 순서대로 연결하면 정확히 연결 된다. )

9. 아두이노 스케치를 실행하고 , 보드에 "LilyPad Arduino" , 프로세서 : "ATmega328P" 를 선택한다.

만약 FTDI 모듈이 필요 없는 "LilyPad USB" 버전일 경우에는 바로 위에 있는 "LilyPad Arduino USB" 를 선택하면 된다.
10. 포트항목에는 좀전에 제어판에서 검색 추가된 'COMxx' 포트를 선택 한다.

11. 포트 연결까지 성공했다면, 릴리패드에 빌트인 되어 있는 LED(13번Port)를 깜빡이는 기본 예제로 작동시켜 보고, 작동이 되면, 릴리패드를 사용하는데 문제가 없는 것이다.
12. 그리고 릴리패드의 장점은 보드 동작전압이 2.7V~5.5V 로 유연하다는 점이다.
따라서 5V USB나 외부전원으로도 동작할 수 있지만, 작고 가벼운 3V 코인셀 전원으로도 동작한다.


이것이 코인셀 베터리 홀더 이다. 컴퓨터, 시계 등에 많이 사용되는 수은전지인 CR2032 (3V) 를 사용하면 된다.

수은전지도 요즘은 수은 중독 위험성 때문에 수은 대신 리튬을 넣어 CR2032를 제조한다.

베터리홀더의 전원스위치를 켜고 베터리가 +,- 전극에 잘 맞물리도록 확인 후 끼워준다.
전지의 +를 위쪽으로하여 끼운다.

릴리 패드는 소형 아두이노 시스템을 구축할 수 있는 장점이 있고,
웨어러블 장치로 많이 사용되는 제품이다.
다음 영상에서는 릴리패드를 이용해서
스마트 휴지통을 만들어 보겠습니다~
자 그럼, 활용하러 고고~!

'아두이노 > 4. 프로젝트 LAB' 카테고리의 다른 글
| 『 매번 물 주기 귀찮은 화분! 말라죽는 우리 집 화분을 구해주세요! 』 아두이노 활용 프로젝트 콘텐츠 소개! 』 (2) | 2020.11.11 |
|---|---|
| 【 릴리패드LilyPAD#3】 우리집 휴지통 스마트하게 바꿔보자! (Plus 영상설명!) (0) | 2019.11.27 |
| 【 아두이노Proj#8】 사륜구동 4WD 블루투스 RC카 만들기~! (with 모터쉴드) (33) | 2019.07.31 |
| 【 아두이노Proj#6】 선없는 조이스틱 블루투스 무선 미니카 만들기~! (HC-05) (7) | 2019.06.25 |
| 【 아두이노Proj#6】 조이스틱 미니카 만들기~! (0) | 2019.05.09 |