

반응형
※ 18650과 같은 리튭배터리는 직접적인 합선(쇼트)이나 회로내에서의 합선 등에 의해 불꽃과 소폭발의 가능성이 있는 제품이므로 다루실 때 충분한 주의와 사전지식이 필요하니 주의하시기 바랍니다.
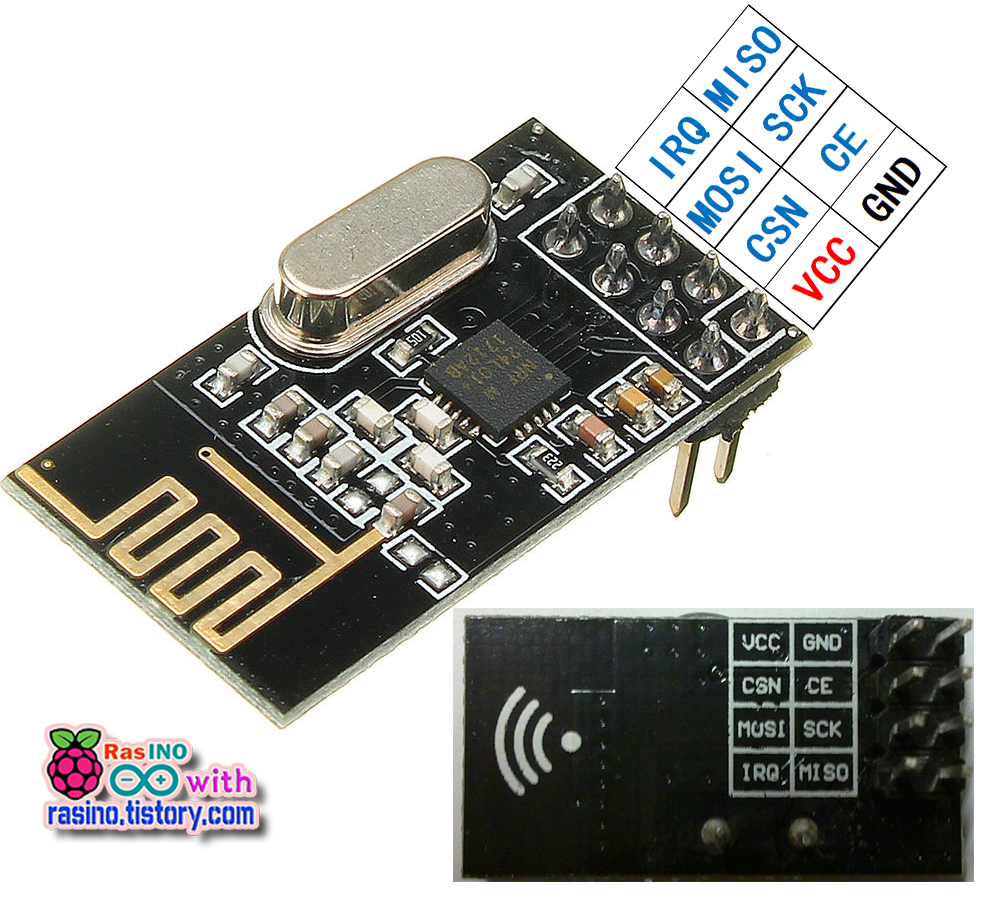
【 아두이노모듈#20】 nRF24L01 : 조이스틱으로 서보모터 무선 제어하기!
지난시간 nRF24L01 모듈을 이용하여 두 대의 아두이노 보드간의 통신 실습을 진행하였다. 간단한 문자를 송신하고 수신측에서는 시리얼모니터를 통해 문자가 잘수신되는지 확인하는 기본적인 실험이었다. 이번엔 "조이스틱을 이용해서 앞뒤로 움직이면 서보모터가 0도~180도 회전하도록 구현해보자. 매우 흥미로울 것이다.
Let's get it~!
▶ 선수학습 :
1. [아두이노 모듈#14] 조이스틱 Joystick 사용하기 #1 ☜ (클릭)
2. [아두이노 모듈#19] 2.4G RF 무선통신 하기! (nRF24L01 기본사용법) ☜ (클릭)
▶