- 옴의 법칙을 다루는 중요한 이유는 전압과 전류와 저항과의 관계를 이해하는 것이 중요하기 때문입니다.
- 코딩도 물론 중요하지만, 아두이노를 다루고자 할때, 전자 부품과 회로에 대한 이해도 매우 중요합니다.
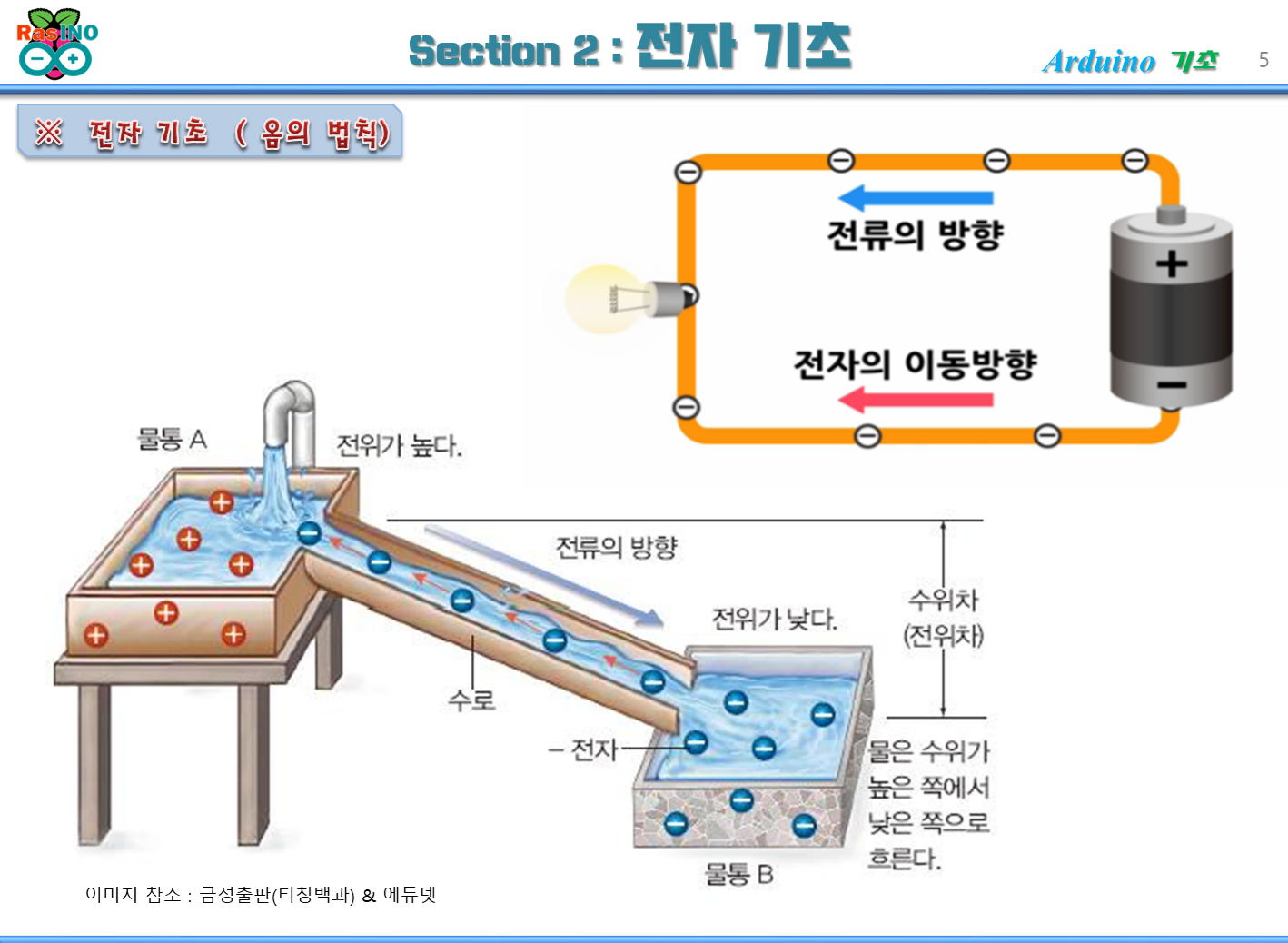
- 전기라는 것은 마이너스(-) 전자 알갱이가 플러스(+) 전자 영역을 향해 이동하는 과정에서 발생하며, 흔히 전기(전류)의 흐름을 +플러스 에서 (-)마이너스로 흐른다고 정의하고 있지만, 실제로는 (-)전자가 마이너스에서 (+)로 즉 반대방향으로 이동 하고 있습니다.
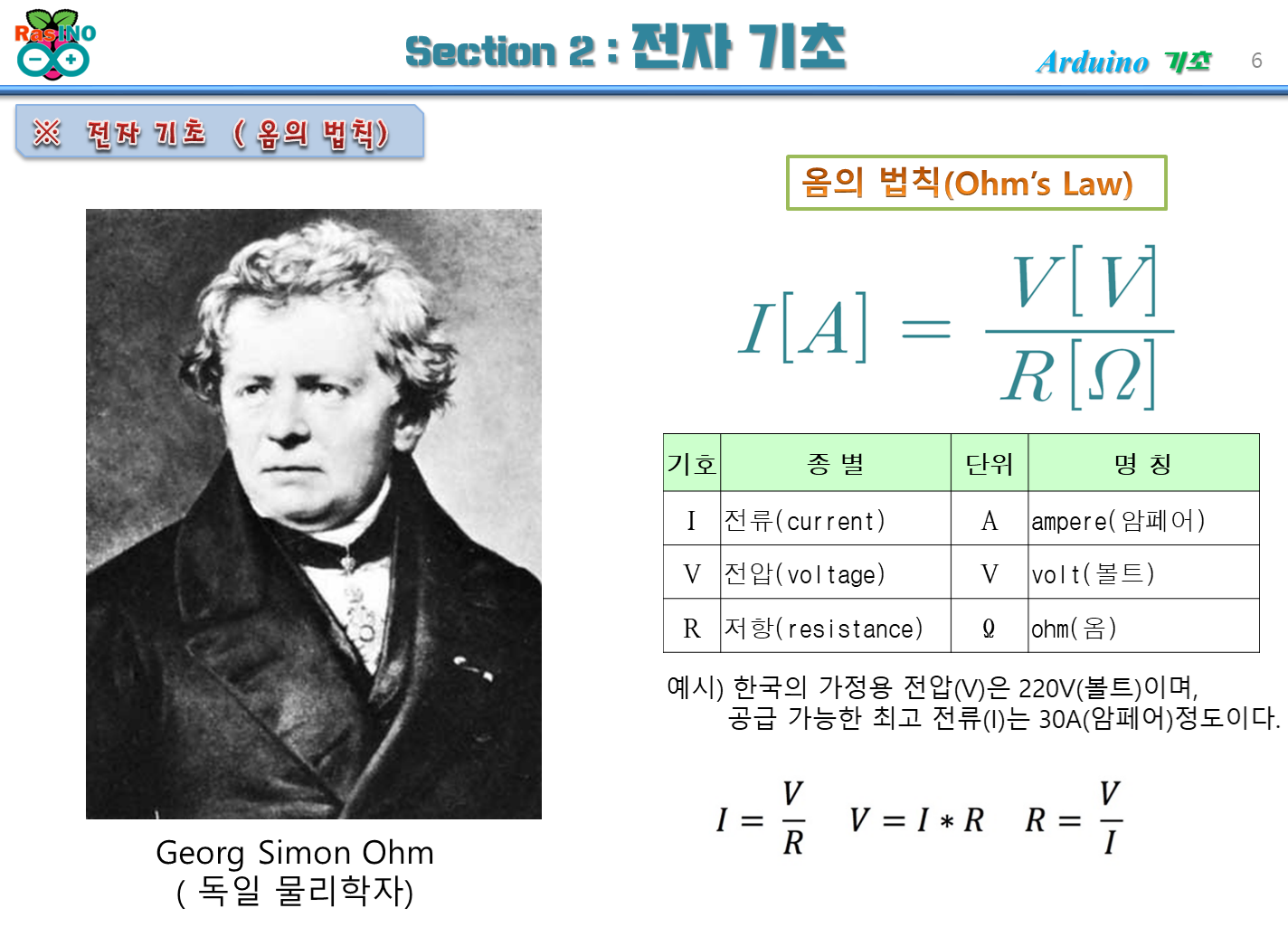
- 옴의 법칙은 전류(I)와 전압(V)과 저항(R)과의 상관 관계를 수학적으로 정의한 법칙을 말합니다.
- 전류와 전압과 저항이라는 것을 I, V, R 의 '기호'로서 함축적으로 표시하고 있으며, 각 요소별 물리적인 양을 나타기 위해 표시하고 있는 A(암페어), V(볼트), Ω (옴) 들을 '단위'라고 합니다. 단위는 표시 할때는 'A'라고 하지만 읽을 때는 발견자의 이름을 딴 '암페어'라고 읽어야 합니다. 전압과 저항도 마찬가지 입니다. 무게를 나타낼 때 100g 라고 표시하지만, 읽을 때는 '100 그램' 이라고 읽는 것과 같은 이치입니다.
옴의 법칙 Ohm's Law
- 옴의 법칙의 핵심은 저항(R)이 일정할 때, 전류(I)와 전압(V)은 서로 비례관계에 있으며, 전압이 일정할 때, 전류와 저항은 반비례관계가 되고, 전류가 일정할 때 전압과 저항은 비례관계가 되는 것입니다.
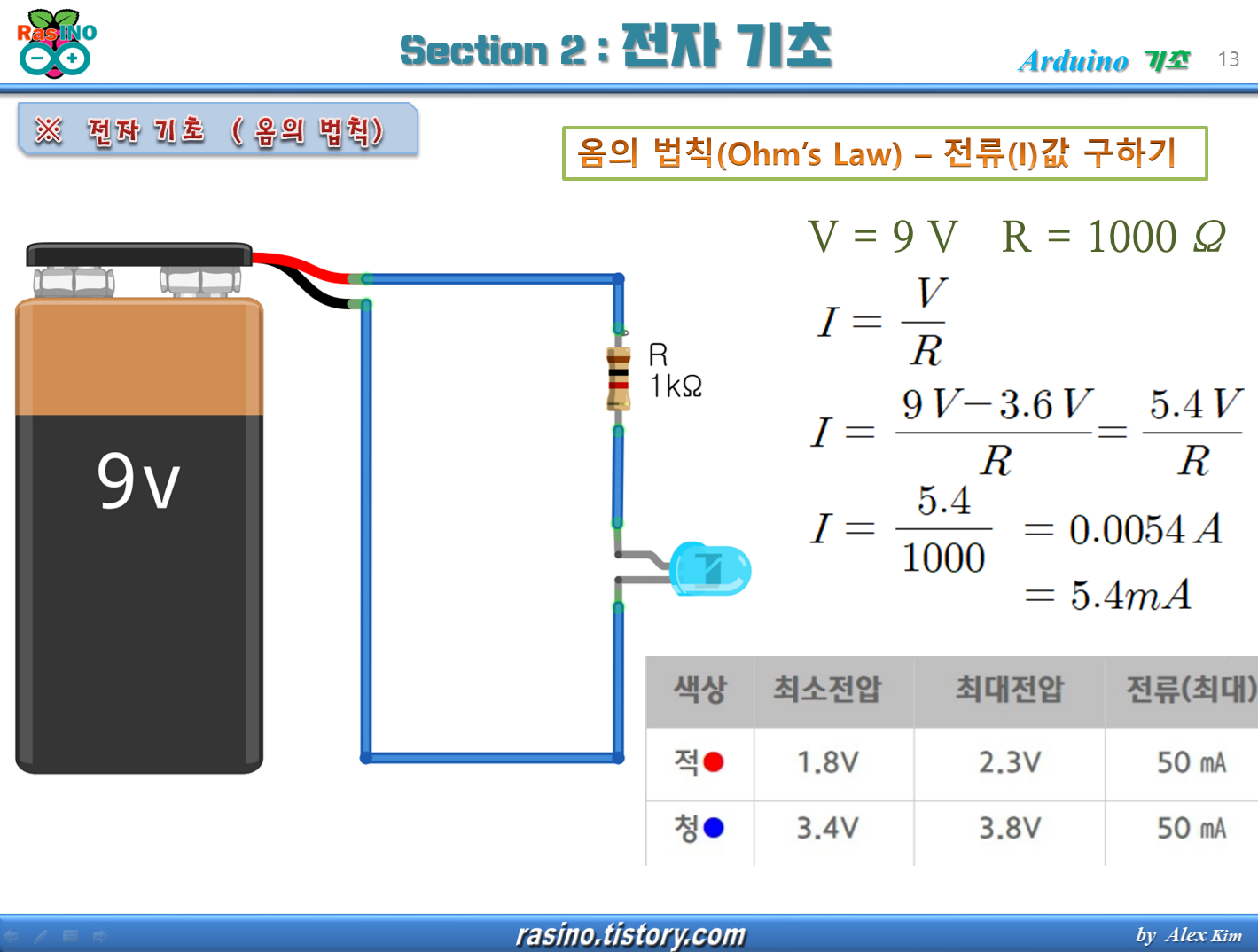
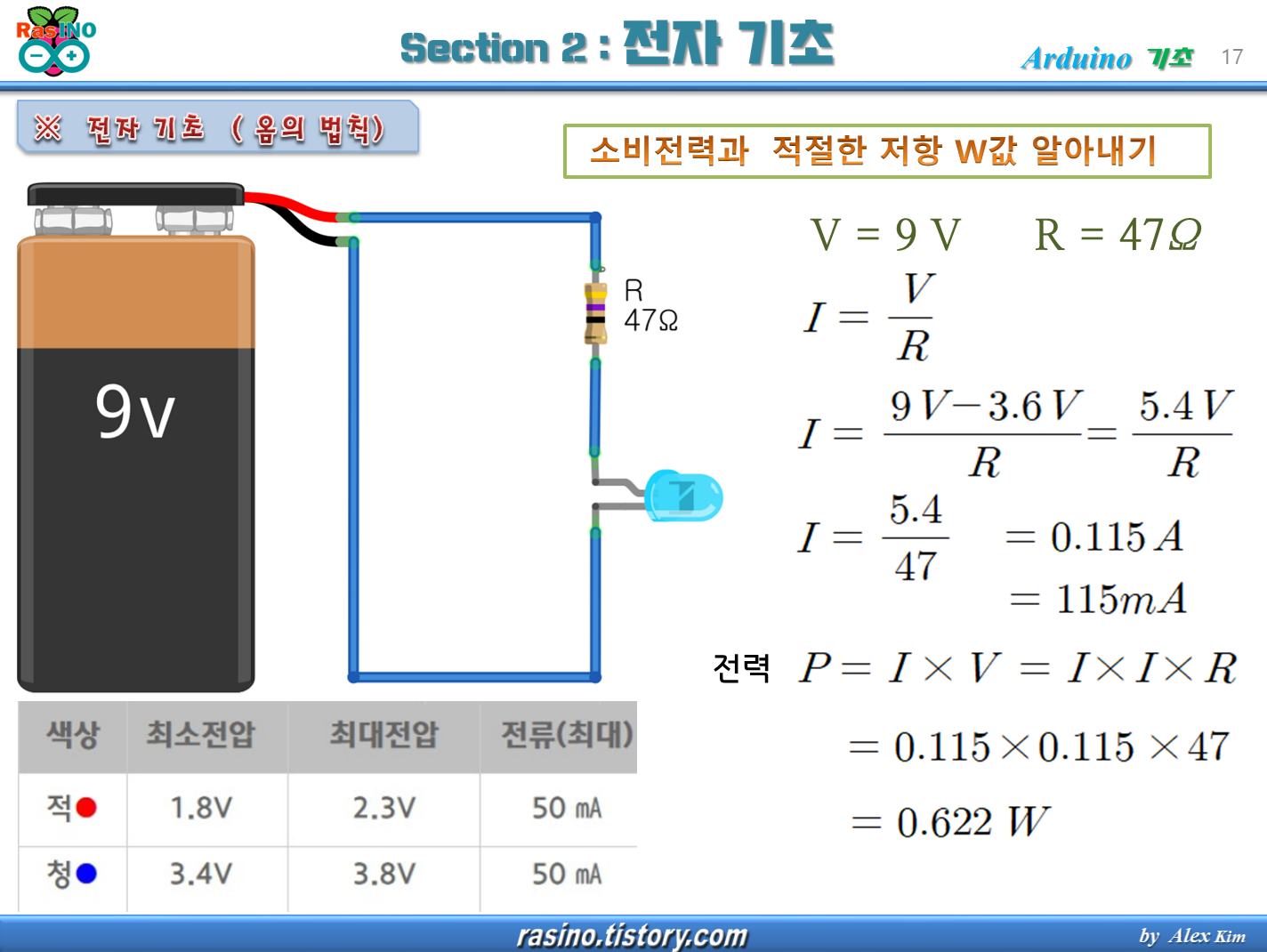
[ 아래는 옴의 법칙을 설명함에 있어 LED와 저항을 사용하는데 참고 하기 위한 LED동작 스펙입니다. ]
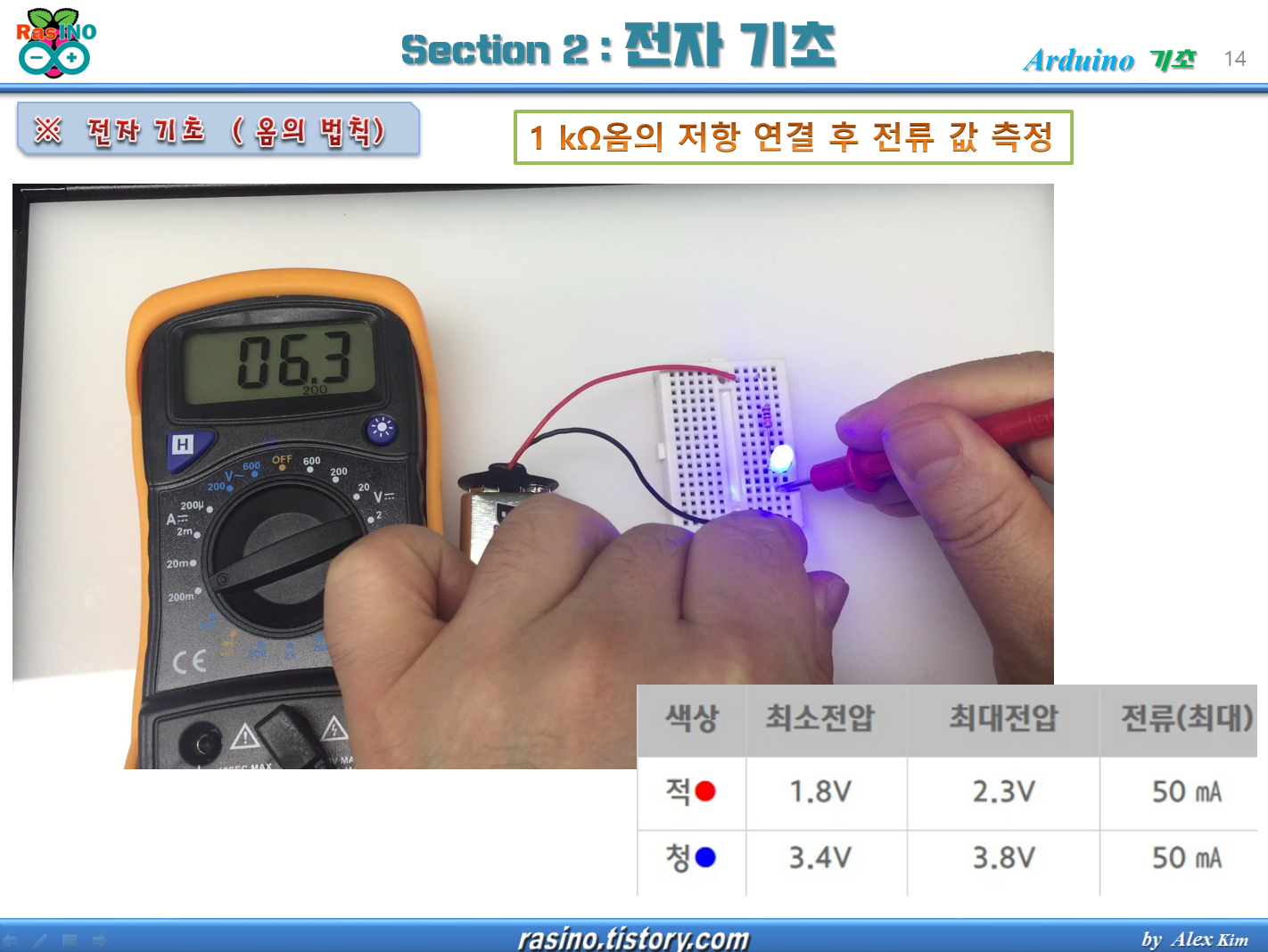
- 위 이미지와 같은 회로를 구성하여 옴의 법칙을 이용한 이론적인 계산값과 아래 이미지처럼 실제 측정한 값이 유사함을 알 수 있습니다. 약간의 오차가 있는 것은, 건전지 자체의 실제 출력이 정확한 9V가 아니며, 건전지 및 LED의 내부저항 값은 비록 작지만 계산에서 제외 되었으며, 계측기 자체의 미세한 오차 등이 결합되어 차이가 나는 것으로 이해하시면 됩니다 .
9V 전지에 100옴 저항과 LED 직렬 연결한 회로의 전류를 측정
- 전압이 (9V) 일정한 상태에서, 100옴의 저항 대신 1KΩ의 저항을 달아, 저항 값을 10배로 키우게 되면, 흐르는 전류도 정확히 10배로 감소하여, 저항과 전류가 반비례 관계임을 확인 할 수 있습니다.
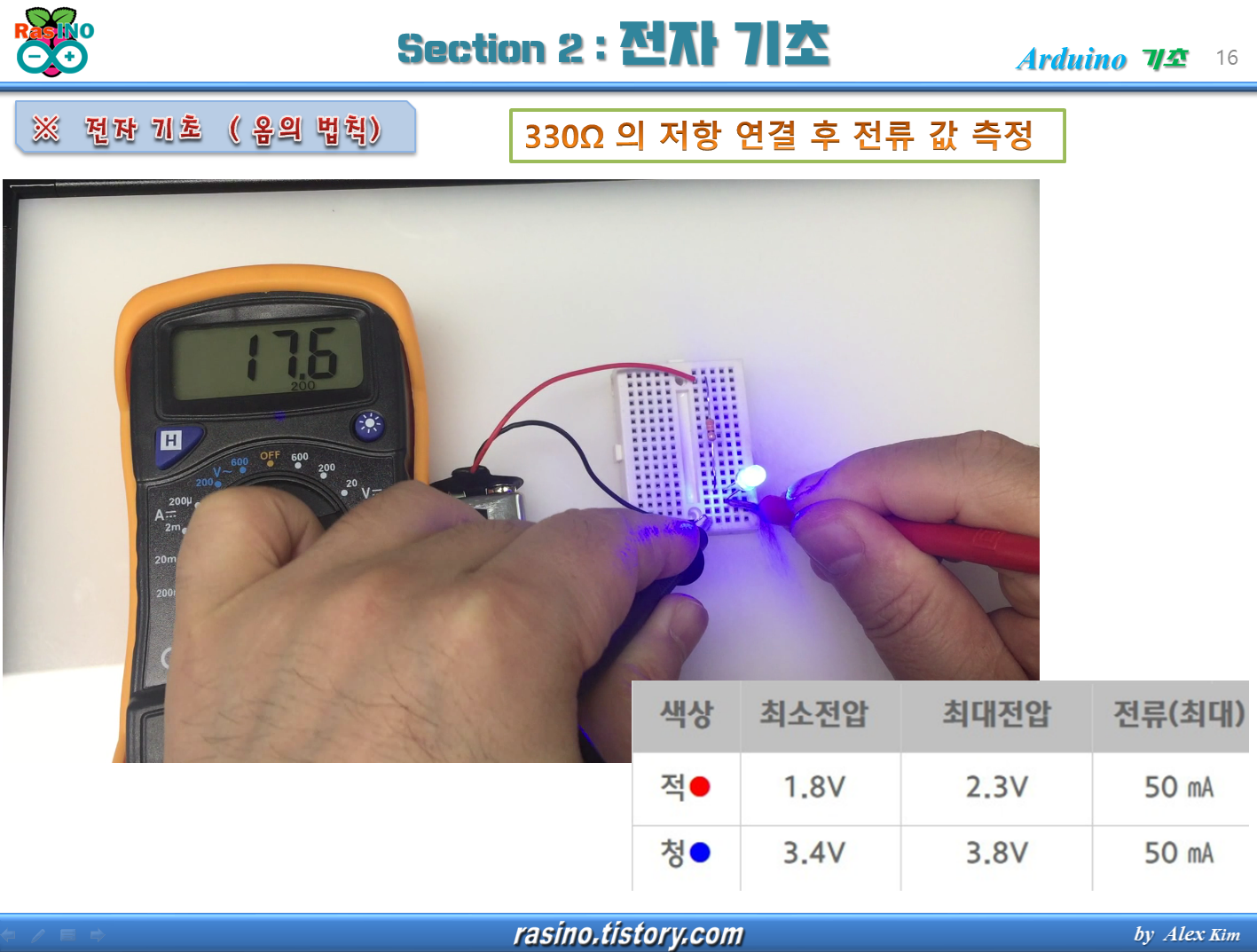
- 또한 저항 값을 줄일 수록 LED가 밝아지며, 저항 값을 키울 수록 LED가 어두워지게 되는데, 저항 값을 너무 줄이게 되면(위 회로에서 100옴 이하) 과전류로 인해 LED가 타버리게 되고, 저항값을 너무 키우게 되면, LED의 불빛이 들어오지 않게 됩니다. 따라서 LED를 동작시킬 수 있는 적정전류(20mA)와 허용 최대전류(50mA) 범위 내에서 전류가 공급되도록 저항값을 조절 하면 됩니다. 일반적으로 200옴~500옴 사이의 값을 사용하며, 아래 처럼 통상 330옴 혹은 220옴을 많이 사용하고 있습니다.
- 그런데, 만약 위 이미지 처럼 공급 전압(9V)에 비해 너무 작은 저항(47옴)을 연결하게 되면, 흐르게 되는 전류가 115mA로서, 허용 한계치를 넘은 LED의 손상이 예상되며, 저항 또한 발생되는 과 소비전력으로 인해 파괴가 될 것입니다.
위 이미지에 소비 전력을 구하는 공식을 P=IV = I x I x R 을 참고 해보면 0.622W의 전력값이 나오는데, 일반적으로 사용하는 저항의 규격인 1/4W (0.25W)를 훨씬 초과하기 때문에 저항도 타거나 하여 문제가 발생하게 됩니다.
- 따라서 옴의 법칙을 이용하여 적절한 용량값을 계산하여 사용한다면, 안정적인 회로 구성을 할 수 있게 됩니다.
같은 저항값이라도 견딜수 있는 전력이 다르다(1/8W, 1/4W, 1/2W, 1W, 2W, 3W 등등)
지난시간, 블루투스모듈을 이용한 통신을 학습하였다. 또한 미니카도 만들어 제어해보았는데, 이제 이 것들을 종합해서 업그레이드 해보도록 하자!
바퀴 4개를 이용하여 4륜 구동으로 만들고 아두이노 프로미니로 소형 리모컨을 만들어 무선제어를 한다면, 교육적이고 멋진 아두이노 장난감을 만들어 낼 수 있다. 여기에 Adafruit 사의 모터쉴드를 이용하면, 별다른 선연결도 없이 간단히 4개의 DC모터를 제어할 수 있다.